
国家材料腐蚀与防护科学数据中心
National Materials Corrosion and Protection Scientific Data Center
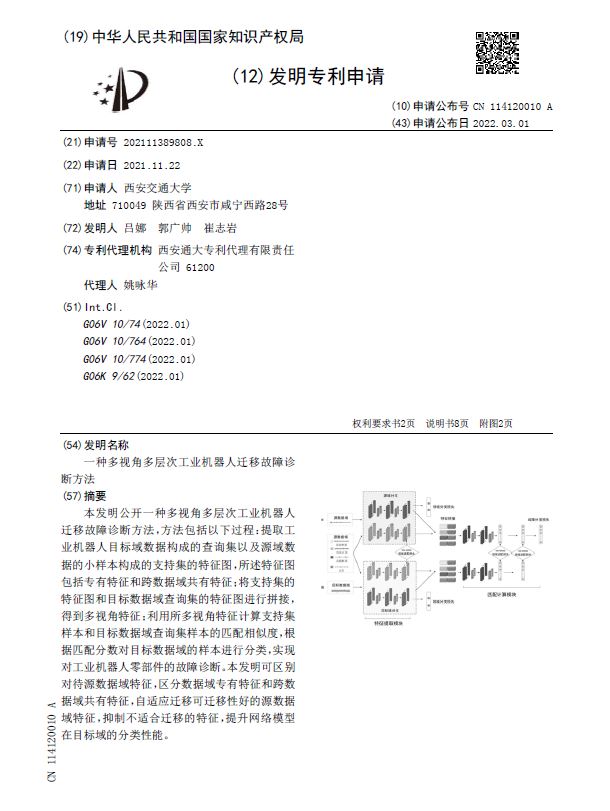
本发明公开一种多视角多层次工业机器人迁移故障诊断方法,方法包括以下过程:提取工业机器人目标域数据构成的查询集以及源域数据的小样本构成的支持集的特征图,所述特征图包括专有特征和跨数据域共有特征;将支持集的特征图和目标数据域查询集的特征图进行拼接,得到多视角特征;利用所多视角特征计算支持集样本和目标数据域查询集样本的匹配相似度,根据匹配分数对目标数据域的样本进行分类,实现对工业机器人零部件的故障诊断。本发明可区别对待源数据域特征,区分数据域专有特征和跨数据域共有特征,自适应迁移可迁移性好的源数据域特征,抑制不适合迁移的特征,提升网络模型在目标域的分类性能。
The invention discloses a multi-view and multi-level industrial robot migration fault diagnosis method, which comprises the following steps: extracting a query set composed of target domain data and a feature map of a support set composed of small samples of source domain data of industrial robots, wherein the feature map includes proprietary features and cross-data domain shared features; Splicing the feature map of the support set and the feature map of the target data domain query set to obtain multi-view features; The matching similarity between the support set sample and the query set sample in the target data domain is calculated by using the multi-perspective features, and the samples in the target data domain are classified according to the matching scores, so as to realize the fault diagnosis of industrial robot parts. The method can treat the source data domain features differently, distinguish the unique features of the data domain from the shared features across the data domains, adaptively migrate the source data domain features with good mobility, suppress the features unsuitable for migration, and improve the classification performance of the network model in the target domain.
 国家材料腐蚀与防护科学数据中心 |
 国家高能物理科学数据中心 |
 国家基因组科学数据中心 |
 国家微生物科学数据中心 |
 国家空间科学数据中心 |
 国家天文科学数据中心 |
 国家对地观测科学数据中心 |
 国家极地科学数据中心 |
 国家青藏高原科学数据中心 |
 国家生态科学数据中心 |
 国家冰川冻土沙漠科学数据中心 |
 国家计量科学数据中心 |
 国家地球系统科学数据中心 |
 国家人口健康科学数据中心 |
 国家基础学科公共科学数据中心 |
 国家农业科学数据中心 |
 国家林业和草原科学数据中心 |
 国家气象科学数据中心 |
 国家地震科学数据中心 |
 国家海洋科学数据中心 |