
国家材料腐蚀与防护科学数据中心
National Materials Corrosion and Protection Scientific Data Center
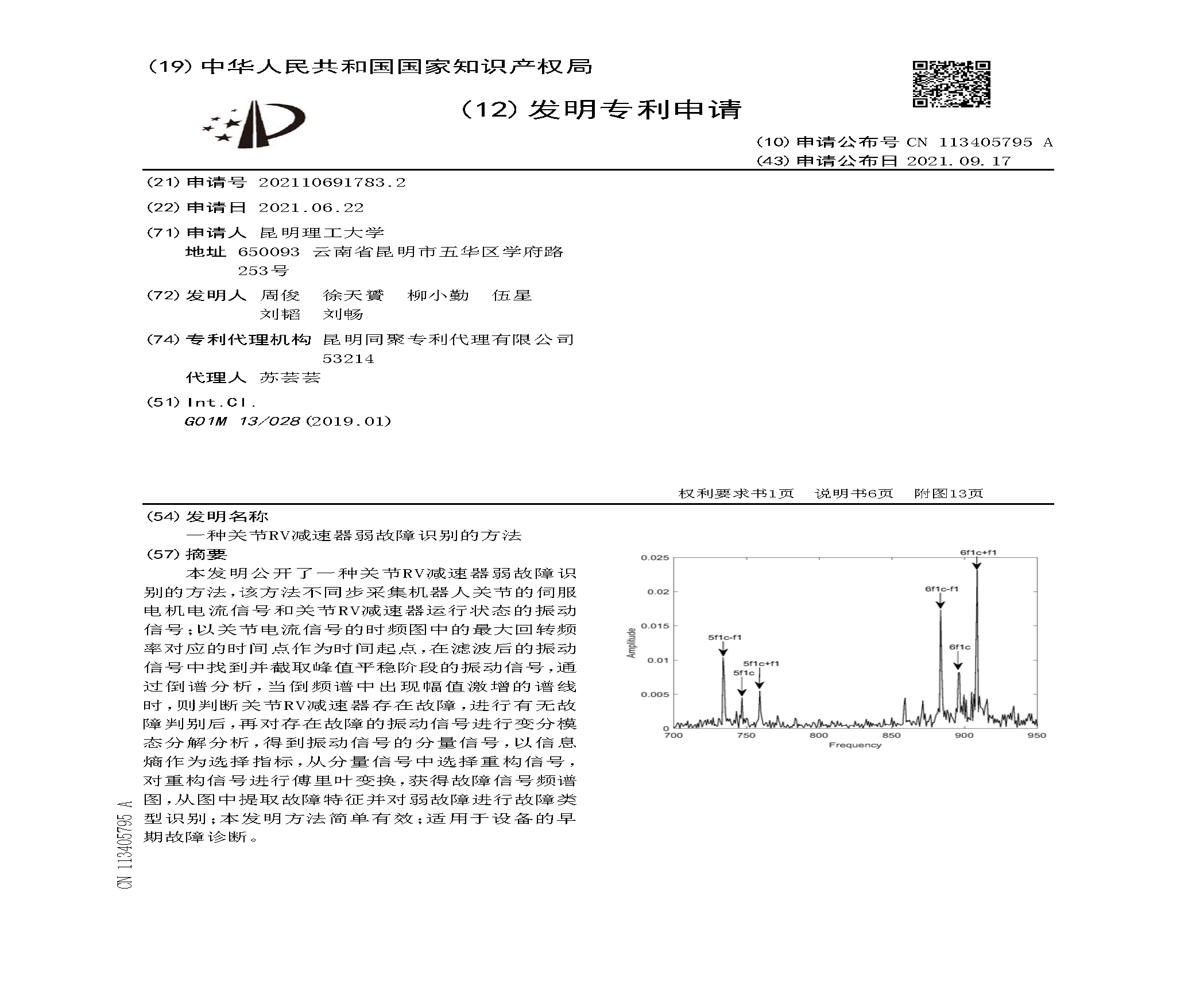
本发明公开了一种关节RV减速器弱故障识别的方法,该方法不同步采集机器人关节的伺服电机电流信号和关节RV减速器运行状态的振动信号;以关节电流信号的时频图中的最大回转频率对应的时间点作为时间起点,在滤波后的振动信号中找到并截取峰值平稳阶段的振动信号,通过倒谱分析,当倒频谱中出现幅值激增的谱线时,则判断关节RV减速器存在故障,进行有无故障判别后,再对存在故障的振动信号进行变分模态分解分析,得到振动信号的分量信号,以信息熵作为选择指标,从分量信号中选择重构信号,对重构信号进行傅里叶变换,获得故障信号频谱图,从图中提取故障特征并对弱故障进行故障类型识别;本发明方法简单有效;适用于设备的早期故障诊断。
The invention discloses a method for identifying weak faults of a joint RV reducer, which asynchronously collects servo motor current signals of robot joints and vibration signals of the running state of the joint RV reducer; Taking the time point corresponding to the maximum gyration frequency in the time-frequency diagram of joint current signal as the time starting point, the vibration signal at the peak stationary stage is found and intercepted from the filtered vibration signal. Through cepstrum analysis, when the spectral line with a sharp increase in amplitude appears in the cepstrum, it is judged that the joint RV reducer has a fault. After judging whether there is a fault or not, the vibration signal with the fault is subjected to variational modal decomposition analysis to obtain the component signal of the vibration signal. Taking information entropy as the selection index, the reconstructed signal is selected from the component signals, and the reconstructed signal is subjected to Fourier transform to obtain the frequency spectrum of the fault signal. The fault features are extracted from the spectrum and the fault types of weak faults are identified. The method of the invention is simple and effective; It is suitable for early fault diagnosis of equipment.
 国家材料腐蚀与防护科学数据中心 |
 国家高能物理科学数据中心 |
 国家基因组科学数据中心 |
 国家微生物科学数据中心 |
 国家空间科学数据中心 |
 国家天文科学数据中心 |
 国家对地观测科学数据中心 |
 国家极地科学数据中心 |
 国家青藏高原科学数据中心 |
 国家生态科学数据中心 |
 国家冰川冻土沙漠科学数据中心 |
 国家计量科学数据中心 |
 国家地球系统科学数据中心 |
 国家人口健康科学数据中心 |
 国家基础学科公共科学数据中心 |
 国家农业科学数据中心 |
 国家林业和草原科学数据中心 |
 国家气象科学数据中心 |
 国家地震科学数据中心 |
 国家海洋科学数据中心 |