
国家材料腐蚀与防护科学数据中心
National Materials Corrosion and Protection Scientific Data Center
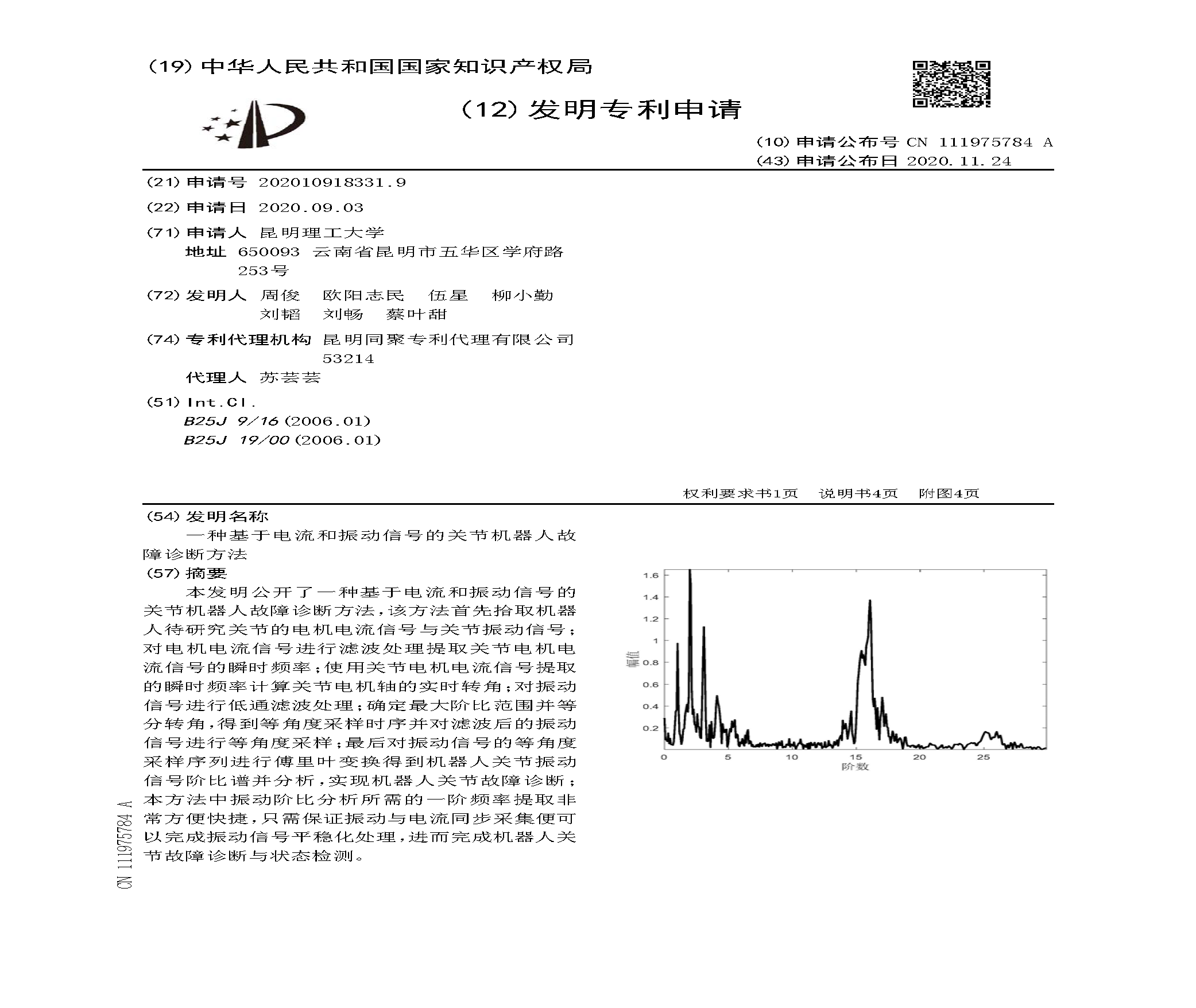
本发明公开了一种基于电流和振动信号的关节机器人故障诊断方法,该方法首先拾取机器人待研究关节的电机电流信号与关节振动信号;对电机电流信号进行滤波处理提取关节电机电流信号的瞬时频率;使用关节电机电流信号提取的瞬时频率计算关节电机轴的实时转角;对振动信号进行低通滤波处理;确定最大阶比范围并等分转角,得到等角度采样时序并对滤波后的振动信号进行等角度采样;最后对振动信号的等角度采样序列进行傅里叶变换得到机器人关节振动信号阶比谱并分析,实现机器人关节故障诊断;本方法中振动阶比分析所需的一阶频率提取非常方便快捷,只需保证振动与电流同步采集便可以完成振动信号平稳化处理,进而完成机器人关节故障诊断与状态检测。
The invention discloses a joint robot fault diagnosis method based on current and vibration signals, which comprises the following steps: firstly, picking up motor current signals and joint vibration signals of a robot joint to be studied; Filtering the motor current signal to extract the instantaneous frequency of the joint motor current signal; Calculating the real-time rotation angle of the joint motor shaft by using the instantaneous frequency extracted from the joint motor current signal; Performing low-pass filtering processing on the vibration signal; Determining the range of the maximum order ratio and equally dividing the rotation angle to obtain the equiangular sampling sequence, and carrying out equiangular sampling on the filtered vibration signal; Finally, Fourier transform is carried out on the equiangular sampling sequence of vibration signal to obtain the order spectrum of robot joint vibration signal and analyze it, so as to realize the robot joint fault diagnosis. In this method, the first-order frequency extraction required for vibration order analysis is very convenient and fast, and the vibration signal can be stabilized only by ensuring the synchronous acquisition of vibration and current, so as to complete the robot joint fault diagnosis and state detection.
 国家材料腐蚀与防护科学数据中心 |
 国家高能物理科学数据中心 |
 国家基因组科学数据中心 |
 国家微生物科学数据中心 |
 国家空间科学数据中心 |
 国家天文科学数据中心 |
 国家对地观测科学数据中心 |
 国家极地科学数据中心 |
 国家青藏高原科学数据中心 |
 国家生态科学数据中心 |
 国家冰川冻土沙漠科学数据中心 |
 国家计量科学数据中心 |
 国家地球系统科学数据中心 |
 国家人口健康科学数据中心 |
 国家基础学科公共科学数据中心 |
 国家农业科学数据中心 |
 国家林业和草原科学数据中心 |
 国家气象科学数据中心 |
 国家地震科学数据中心 |
 国家海洋科学数据中心 |