
国家材料腐蚀与防护科学数据中心
National Materials Corrosion and Protection Scientific Data Center
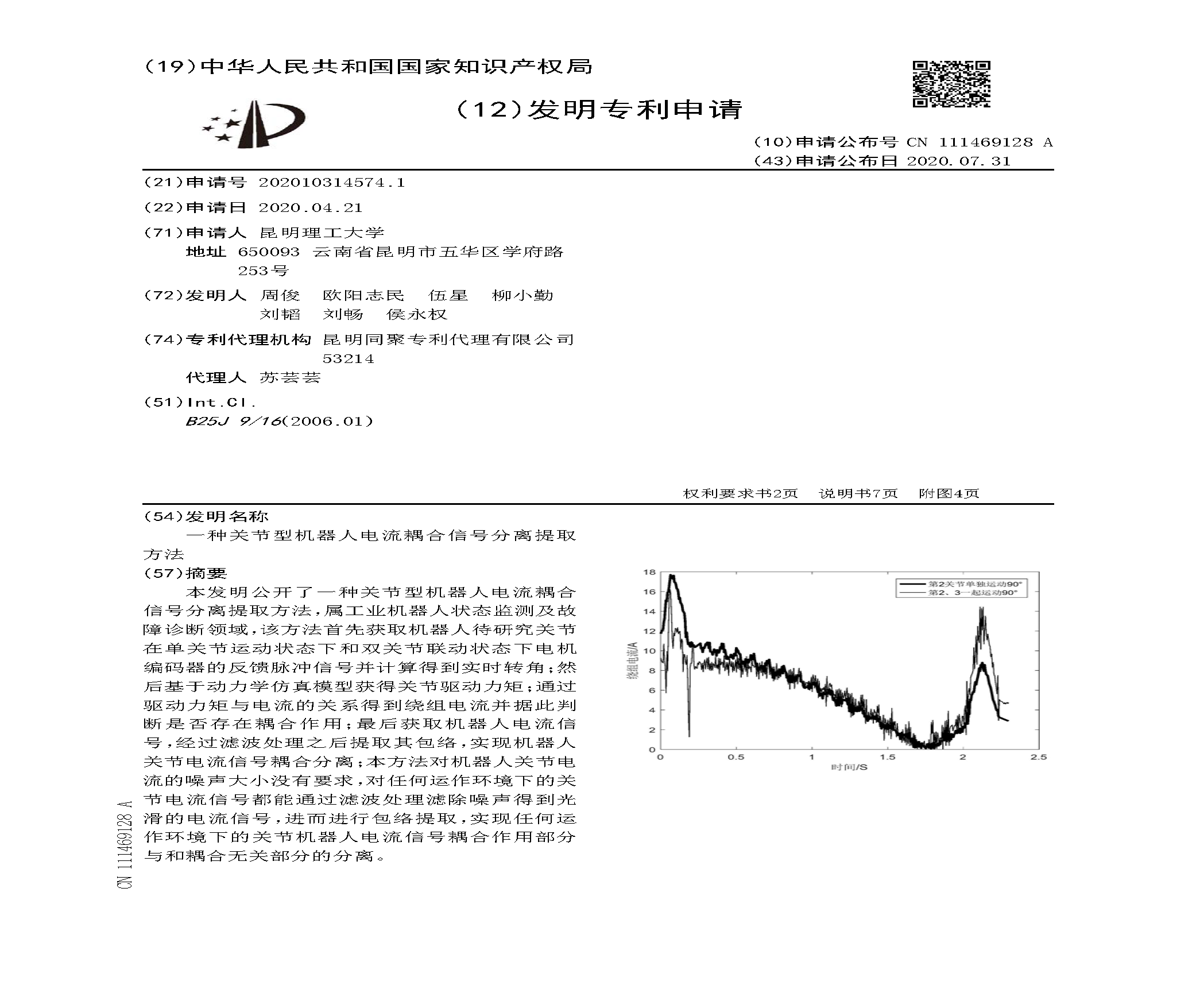
本发明公开了一种关节型机器人电流耦合信号分离提取方法,属工业机器人状态监测及故障诊断领域,该方法首先获取机器人待研究关节在单关节运动状态下和双关节联动状态下电机编码器的反馈脉冲信号并计算得到实时转角;然后基于动力学仿真模型获得关节驱动力矩;通过驱动力矩与电流的关系得到绕组电流并据此判断是否存在耦合作用;最后获取机器人电流信号,经过滤波处理之后提取其包络,实现机器人关节电流信号耦合分离;本方法对机器人关节电流的噪声大小没有要求,对任何运作环境下的关节电流信号都能通过滤波处理滤除噪声得到光滑的电流信号,进而进行包络提取,实现任何运作环境下的关节机器人电流信号耦合作用部分与和耦合无关部分的分离。
The invention disclose a method for separating and extract that current coupling signal of an articulated robot, which belongs to the field of state monitoring and fault diagnosis of industrial robot. the method comprises the following steps: firstly, obtaining the feedback pulse signal of a motor encoder of a robot to be studied in a single-joint motion state and a double-joint linkage state, and calculating to obtain a real-time rotation angle; Then the joint driving torque is obtained based on the dynamic simulation model. According to the relationship between driving torque and current, the winding current can be obtained and whether there is coupling action can be judged. Finally, the robot current signal is obtained, and its envelope is extracted after filtering, so as to realize the coupling and separation of the robot joint current signal. The method has no requirement on the noise of the robot joint current, and the joint current signal in any operating environment can be filtered out by filtering to obtain a smooth current signal, and then the envelope is extracted to realize the separation of the coupling part and the unrelated part of the joint robot current signal in any operating environment.
 国家材料腐蚀与防护科学数据中心 |
 国家高能物理科学数据中心 |
 国家基因组科学数据中心 |
 国家微生物科学数据中心 |
 国家空间科学数据中心 |
 国家天文科学数据中心 |
 国家对地观测科学数据中心 |
 国家极地科学数据中心 |
 国家青藏高原科学数据中心 |
 国家生态科学数据中心 |
 国家冰川冻土沙漠科学数据中心 |
 国家计量科学数据中心 |
 国家地球系统科学数据中心 |
 国家人口健康科学数据中心 |
 国家基础学科公共科学数据中心 |
 国家农业科学数据中心 |
 国家林业和草原科学数据中心 |
 国家气象科学数据中心 |
 国家地震科学数据中心 |
 国家海洋科学数据中心 |