
国家材料腐蚀与防护科学数据中心
National Materials Corrosion and Protection Scientific Data Center
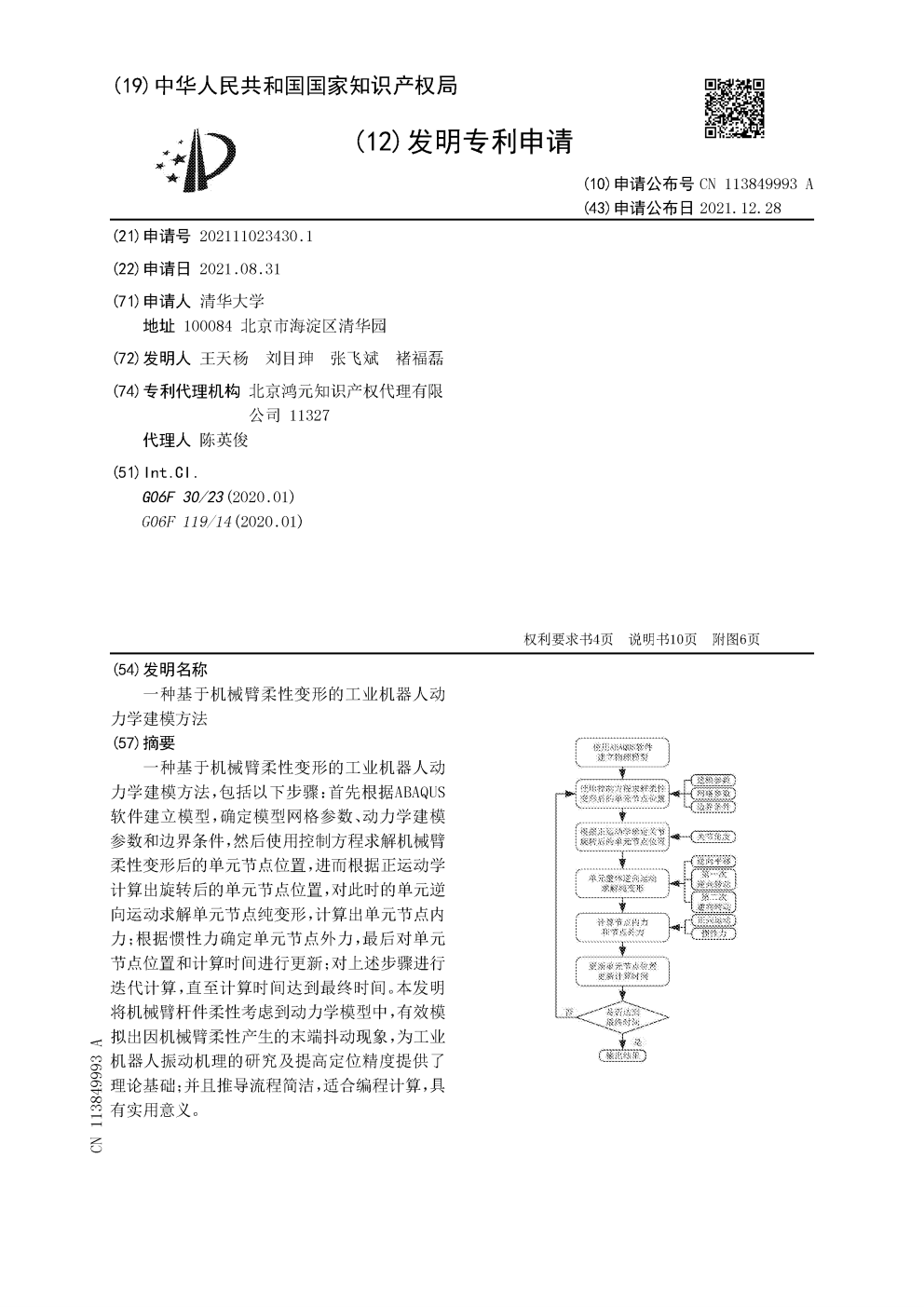
一种基于机械臂柔性变形的工业机器人动力学建模方法,包括以下步骤:首先根据ABAQUS软件建立模型,确定模型网格参数、动力学建模参数和边界条件,然后使用控制方程求解机械臂柔性变形后的单元节点位置,进而根据正运动学计算出旋转后的单元节点位置,对此时的单元逆向运动求解单元节点纯变形,计算出单元节点内力;根据惯性力确定单元节点外力,最后对单元节点位置和计算时间进行更新;对上述步骤进行迭代计算,直至计算时间达到最终时间。本发明将机械臂杆件柔性考虑到动力学模型中,有效模拟出因机械臂柔性产生的末端抖动现象,为工业机器人振动机理的研究及提高定位精度提供了理论基础;并且推导流程简洁,适合编程计算,具有实用意义。
A method for modelling the dynamics of an industrial robot based on the flexible deformation of a robotic arm, comprising the following steps: first establishing a model based on ABAQUS, determining the model mesh parameters, dynamics modelling parameters and boundary conditions, then using the control equations to solve for the unit node position after the flexible deformation of the robotic arm, then calculating the unit node position after rotation according to positive kinematics, reversing the unit motion at this point Solve for the pure deformation of the unit node and calculate the unit node internal force; determine the unit node external force according to the inertial force, and finally update the unit node position and calculation time; iterate on the above steps until the calculation time reaches the final time. The invention takes the flexibility of the robotic arm bar into account in the dynamics model, effectively simulates the end jitter phenomenon due to the flexibility of the robotic arm, and provides a theoretical basis for the study of the vibration mechanism of industrial robots and the improvement of positioning accuracy; and the derivation process is simple and suitable for programming calculations, which has practical significance.
 国家材料腐蚀与防护科学数据中心 |
 国家高能物理科学数据中心 |
 国家基因组科学数据中心 |
 国家微生物科学数据中心 |
 国家空间科学数据中心 |
 国家天文科学数据中心 |
 国家对地观测科学数据中心 |
 国家极地科学数据中心 |
 国家青藏高原科学数据中心 |
 国家生态科学数据中心 |
 国家冰川冻土沙漠科学数据中心 |
 国家计量科学数据中心 |
 国家地球系统科学数据中心 |
 国家人口健康科学数据中心 |
 国家基础学科公共科学数据中心 |
 国家农业科学数据中心 |
 国家林业和草原科学数据中心 |
 国家气象科学数据中心 |
 国家地震科学数据中心 |
 国家海洋科学数据中心 |