
国家材料腐蚀与防护科学数据中心
National Materials Corrosion and Protection Scientific Data Center
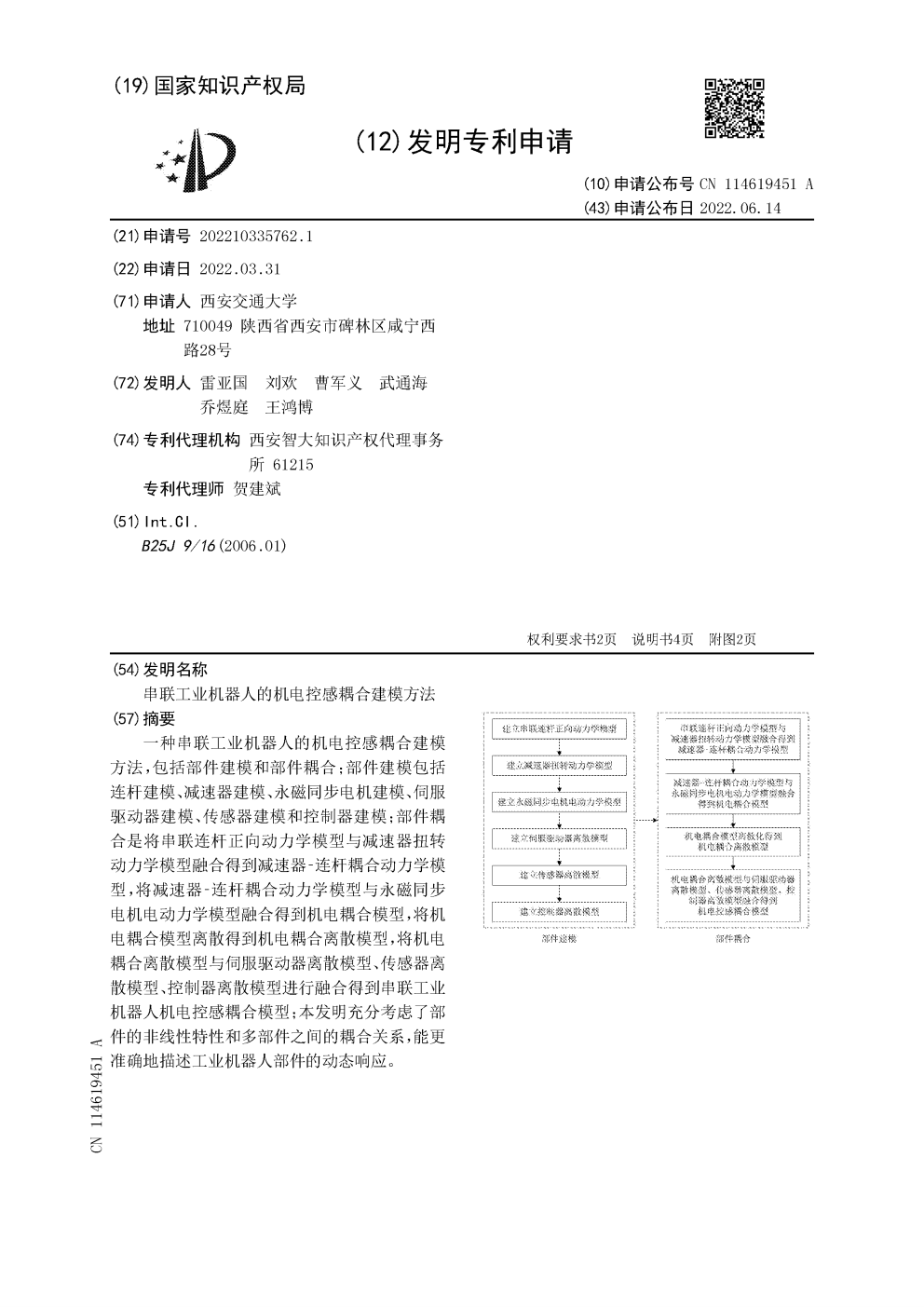
串联工业机器人的机电控感耦合建模方法,包括部件建模和部件耦合。部件建模包括建立串联连杆正向动力学模型、减速器扭转动力学模型、永磁同步电机电动力学模型、伺服驱动器离散模型、传感器离散模型和控制器离散模型;部件耦合包括串联连杆正向动力学模型与减速器扭转动力学模型融合、减速器-连杆耦合动力学模型与永磁同步电机电动力学模型融合、机电耦合模型离散,机电耦合离散模型与伺服驱动器离散模型、传感器离散模型、控制器离散模型融合。本发明充分考虑了部件的非线性特性和多部件之间的耦合关系,提出的机电控感耦合模型能更准确地描述串联工业机器人部件的动态响应。
A coupled electromechanical-control-perceptual modelling approach for serial industrial robots, including component modelling and component coupling. The component modelling includes building a tandem linkage forward dynamics model, a reducer torsion dynamics model, a permanent magnet synchronous motor electrodynamics model, a servo drive discrete model, a sensor discrete model and a controller discrete model; the component coupling includes fusion of the tandem linkage forward dynamics model with the reducer torsion dynamics model, fusion of the reducer-linkage coupling dynamics model with the permanent magnet synchronous motor electrodynamics model, and electromechanical coupling model discrete, and electromechanical coupling discrete model fused with servo drive discrete model, sensor discrete model, and controller discrete model. The invention fully considers the non-linear characteristics of the components and the coupling relationship between multiple components, and the proposed electromechanical control-sense coupling model can more accurately describe the dynamic response of tandem industrial robot components.
 国家材料腐蚀与防护科学数据中心 |
 国家高能物理科学数据中心 |
 国家基因组科学数据中心 |
 国家微生物科学数据中心 |
 国家空间科学数据中心 |
 国家天文科学数据中心 |
 国家对地观测科学数据中心 |
 国家极地科学数据中心 |
 国家青藏高原科学数据中心 |
 国家生态科学数据中心 |
 国家冰川冻土沙漠科学数据中心 |
 国家计量科学数据中心 |
 国家地球系统科学数据中心 |
 国家人口健康科学数据中心 |
 国家基础学科公共科学数据中心 |
 国家农业科学数据中心 |
 国家林业和草原科学数据中心 |
 国家气象科学数据中心 |
 国家地震科学数据中心 |
 国家海洋科学数据中心 |