
国家材料腐蚀与防护科学数据中心
National Materials Corrosion and Protection Scientific Data Center
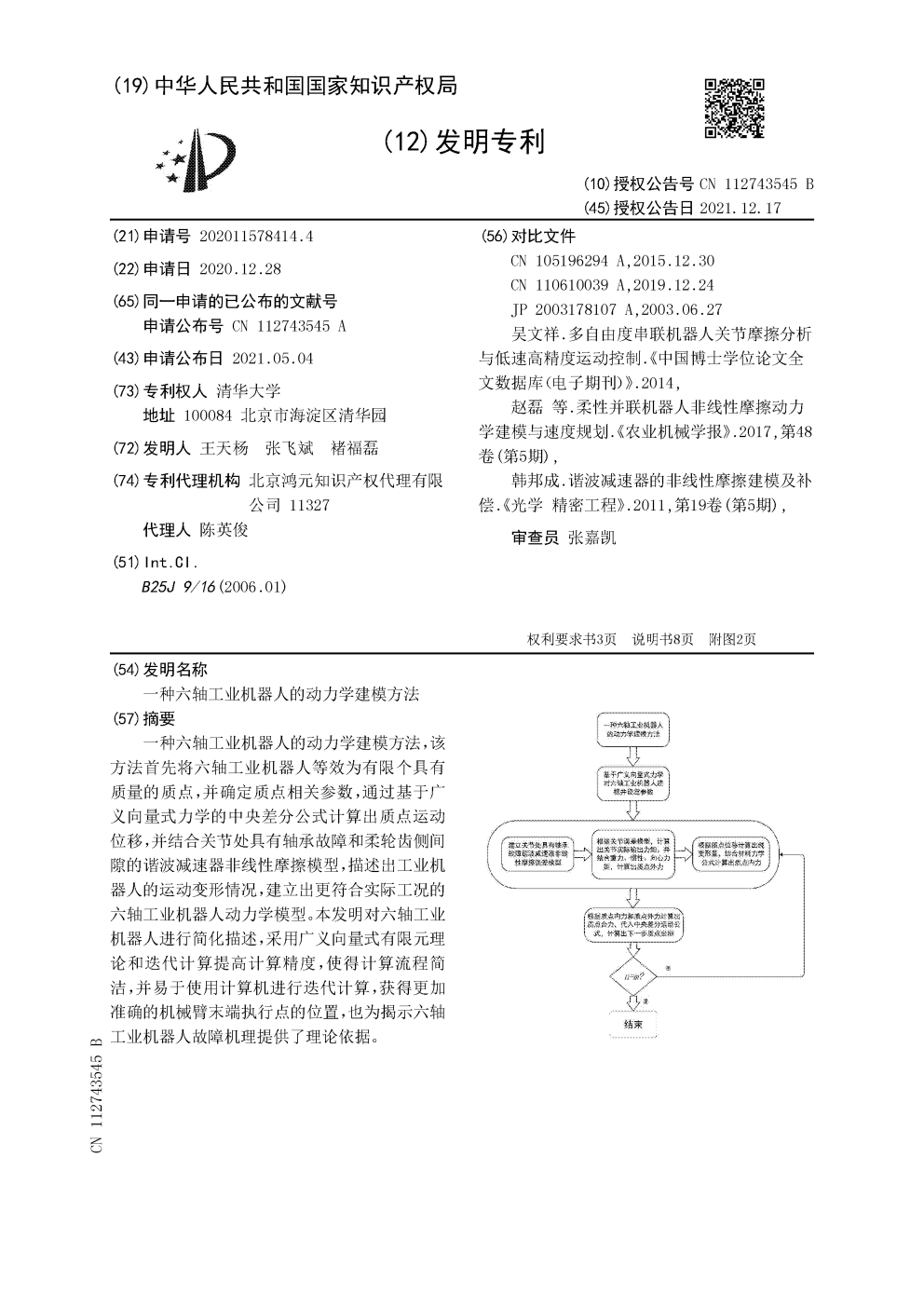
一种六轴工业机器人的动力学建模方法, 该方法首先将六轴工业机器人等效为有限个具有质量的质点, 并确定质点相关参数, 通过基于广义向量式力学的中央差分公式计算出质点运动位移, 并结合关节处具有轴承故障和柔轮齿侧间隙的谐波减速器非线性摩擦模型, 描述出工业机器人的运动变形情况, 建立出更符合实际工况的六轴工业机器人动力学模型。 本发明对六轴工业机器人进行简化描述, 采用广义向量式有限元理论和迭代计算提高计算精度,使得计算流程简洁, 并易于使用计算机进行迭代计算, 获得更加准确的机械臂末端执行点的位置, 也为揭示六轴工业机器人故障机理提供了理论依据。
A method for the dynamics modelling of six-axis industrial robots. This method first equates the six-axis industrial robot to a finite number of masses and determines the parameters related to the masses. A more realistic model of the dynamics of the six-axis robot is developed. The invention uses generalised vectorial finite element theory and iterative computation to improve the accuracy of the computation, making the computation process simple and easy to use for computer iterative computation.
 国家材料腐蚀与防护科学数据中心 |
 国家高能物理科学数据中心 |
 国家基因组科学数据中心 |
 国家微生物科学数据中心 |
 国家空间科学数据中心 |
 国家天文科学数据中心 |
 国家对地观测科学数据中心 |
 国家极地科学数据中心 |
 国家青藏高原科学数据中心 |
 国家生态科学数据中心 |
 国家冰川冻土沙漠科学数据中心 |
 国家计量科学数据中心 |
 国家地球系统科学数据中心 |
 国家人口健康科学数据中心 |
 国家基础学科公共科学数据中心 |
 国家农业科学数据中心 |
 国家林业和草原科学数据中心 |
 国家气象科学数据中心 |
 国家地震科学数据中心 |
 国家海洋科学数据中心 |